
| Autor | Wypowiedź |
|
2013-01-20, 13:30
Pomógł 0 raz(y).
|
Witam tworzę projekt platformy autonomicznej i mam problem z wiązaniami. Otóż chcę aby ramię manipulatora nie przechodziło przez jego podstawę oraz część obrotową. W jaki sposób dodać wiązania aby można było to określić? Na rysunku przedstawiam o co mi chodzi. Dodam że próbowałem wiązania zawiasowego ale nie mogę zazanaczyć do kątów ramienia i wymaganych płaszczyzn.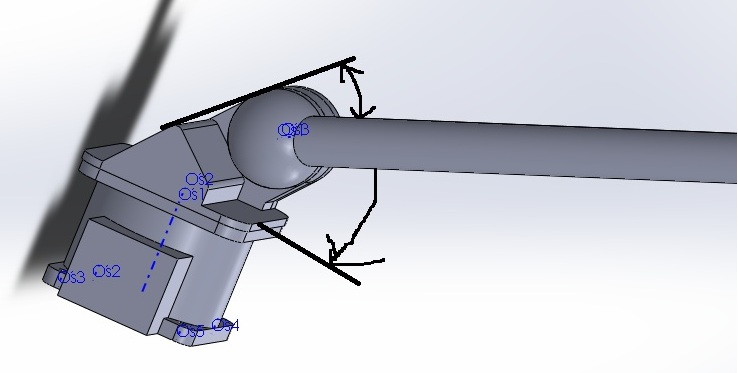 |
|
|
|
|
Engineer of old school
2013-01-20, 14:23
Pomógł 20 raz(y).
|
Gdzie ten rysunek |
|
|
|
|
2013-01-20, 14:41
Pomógł 0 raz(y).
|
Już poprawione. |
|
|
|
|
Panienka do wszystkiego
2013-01-20, 16:42
Pomógł 66 raz(y).
|
Czesc, w ramieniu musisz miec plaszczyzne przechodzaca przez os obrotu i os ramienia. Mozna tez skorzystac z osi ( tez temp.) o ile takie sa dostepne lub nawet z elementow szkicow (do wyciagniecia przez obrot). Nastepnie we wiazaniach rozszerzonych mozesz ustawic LIMIT kata (min, max). Pozdr. tomek |
|
|
|
|
2013-01-20, 21:52
Pomógł 0 raz(y).
|
Robię płaszczyzne tak jak napisałeś ale dalej mi to nic nie daje. Gdy łączę ją wiązaniem z podstawą którą ma nie przecinać nie mogę ustawić kątów. Czy może ja coś robię źle czy źle cię zrozumiałem. |
|
|
|
|
CSWP, CSWE, CSWI *** solid-blog.pl ***
2013-01-21, 01:01
Pomógł 410 raz(y).
|
Zaznacz płaszczyznę w ramieniu i podstawę (z której wychodzi czarna kreska) następnie na karcie zaawansowane wiązania wybierz kąt i wprowadź wartości plus minus albo tylko na plus od położenia zero. |
|
|
|
|
2013-01-21, 18:08
Pomógł 0 raz(y).
|
Dzięki wielkie za wyjaśnienie już wszystko działa. |
|
|
|
PSWUG |
Strefa Resellera |
Publikuj |
SpołecznośćAnkieta |
Linki |
|
 Strona główna
Strona główna Tricks&Tips
Tricks&Tips Dodatki
Dodatki

 RSS
RSS